Robotic Manipulator Arms Developed For International Space Station
Working in space is difficult and complicated. Human beings working in bulky spacesuits with specially designed tools have been doing the construction and repair work on satellites, space craft and space stations. Beginning with the Space Shuttle, robotic manipulator arms have been under development to assist and, in some cases, replace human beings for manipulating and repairing things in space.
The International Space Station has a robotic arm developed in Canada called the Canadarm2. The first Canadarms deployed were directly mounted on the U.S. space shuttles for use in loading and unloading the cargo holds. They could only load at a little over two inches a second but could unload at twenty four inches a second. The early Canadarms had a reach of about fifteen feet. Their range of motion was similar to a human arm with a double-jointed shoulder, a single-jointed elbow and a triple-jointed wrist. These Canadarms moved cargo but also found use in removing ice, manipulating satellites and as camera booms.
After the retirement of the Space Shuttle program, the Canadarm was redesigned. One of the new Canadarm2s was sent up to and installed on the International Space Station. It is capable of moving around on the surface of the ISS with the assistance of the Mobile Base System. It can use its Latching End Effectors to attach to Power Data Grapple Fixtures to draw power, and exchange video and data feeds. It has a similar configuration to the original Canadarm but its seven joints can move through five hundred and forty degrees. Its components can be replaced in orbit. It has force movement sensors that give it a sense of touch and four color cameras to keep track of motion and targets. The Canadarm2 can load cargo at about an inch a second and unload cargo at about fifteen inches a second. The new Canadarm2 has more capabilities than the first generation and it helped assemble the ISS. It can be operated by a human operator or by a computer.
Following the development of the second generation Canadarm, Canada developed the Special Purpose Dexterous Manipulator also known Dextre. It is a two armed teleoperated robot which is now a part of the Mobile Servicing System on the ISS. It is capable of doing repairs that would normally require a spacewalk. Dextre is has a central cylindrical "torso" with two very flexible eleven foot arms. It can pivot at its waist. Dextre has a grapple at the base of the torso which can be grasped by the Canadarm2. The other end of the torso has a connector that can attach to the ISS grapple fixtures also used by the Canadarm2 or the Mobile Base System.
Various components are attached to the ORU/Tool Changeout Mechanisms on the wrists at the ends of Dextre's arms. These include grasping jaws, a retractable socket drive, a monochrome TV camera, lights, and a cable with connectors to draw power and exchange data and video with external payloads. Dextre has a tool holster that contains devices that allow other tools to be attached to the arms such as wire cutters, safety cap removal tools, EVR nozzle tool and a multifunction tool with more adaptors.
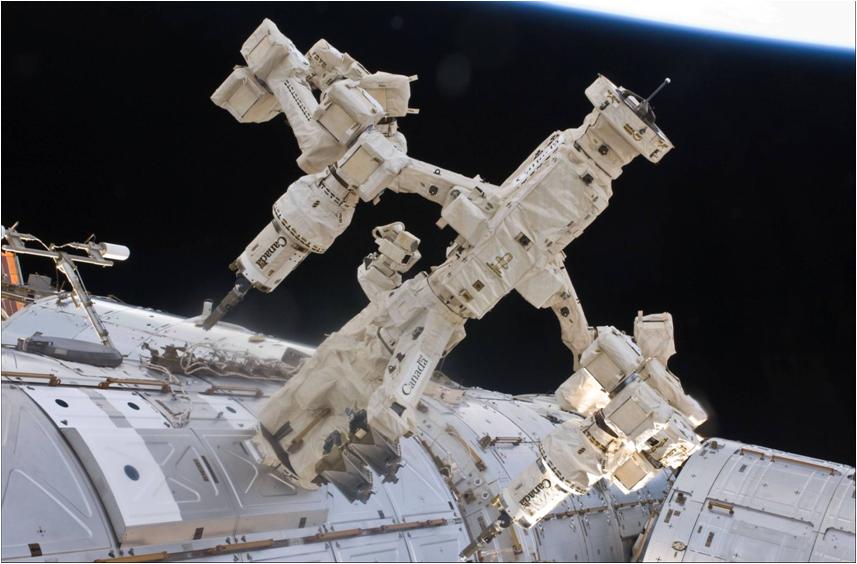
Canadarm2:

Dextre: